En este documento se explica el proceso para desarrollar la cinemática inversa del robot Px Phantom, de igual manera, se indica cómo se desarrollaron los algoritmos para manipular el robot entorno a una rutina pick and place a través del teclado.
Lab 3 Robótica
Elaborado por:
- Javier Caicedo
- Julián Luna.
- Determinar el modelo cinemático inverso del robot Phantom X.
- Generar trayectorias simples a partir del modelo cinemático inverso del robot.
- Implementar el modelo cinemático inverso del robot en MATLAB.
- Operar el robot usando ROS a partir de trayectorias generadas en MATLAB o Python.
- Ubuntu versión 20.xx preferible 20.04 LTS con ROS.
- Espacio de trabajo para catkin correctamente configurado.
- Paquetes de Dynamixel Workbench. https://github.com/fegonzalez7/rob_unal_clase3
- Paquete del robot Phantom X: https://github.com/felipeg17/px_robot.
- MATLAB 2015b o superior instalado en el equipo.
- Robotics toolbox de Mathworks (Disponible desde la versión 2015 en adelante).
- Toolbox de rob´otica de Peter Corke.
- Piezas tipo 1 y 2 del proyecto (ver planos adjuntos).
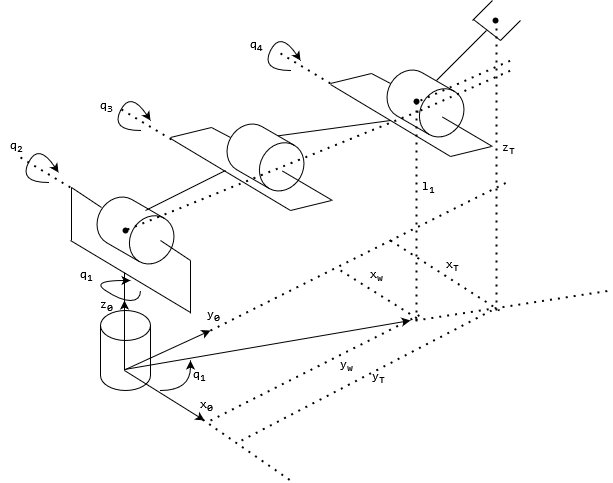
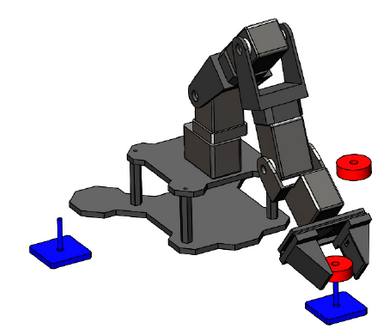
El problema cinemático inverso consiste en determinar la configuración articular de un manipulador, dadas la posición y orientación del efector final respecto a la base. Este problema puede resolverse mediante métodos geométricos, algebraicos o numéricos. En el caso particular del robot Phantom X el cual posee 4 GDL, el enfoque más práctico es combinar el método geométrico con el desacople de muñeca.
El modelo geométrico construido se muestra a continuación.

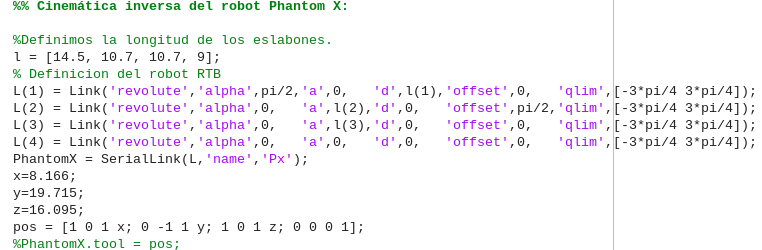
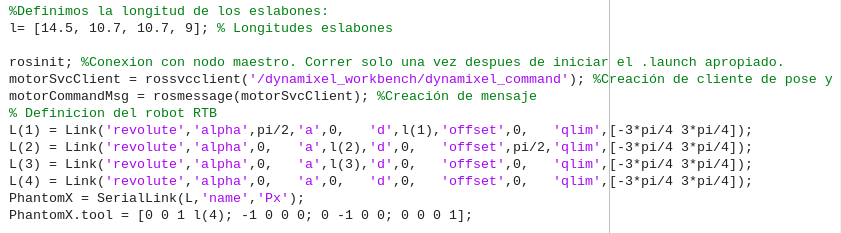
A continuación se muestra el desarrollo alcanzado de la cinemática inversa en Matlab. Definimos las longitudes de los eslabones, así como los parámetros de la cinemática directa para poder realizar las diferentes asociaciones entre los eslabones que conforman la cadena cinemática del Robot Phantom.
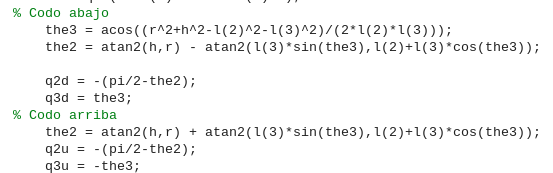
Luego definimos las expresiones algebraicas que nos permiten calcular cada uno de los ángulos que definen la postura del robot con relación a la MTH definida como pos, que define la postura de la herramienta para la cual queremos hallar una solución mediante cinemática inversa, cabe señalar que estas soluciones se desprenden del análisis geométrico del sistema, en el cual se obtiene la solución codo arriba y codo abajo.
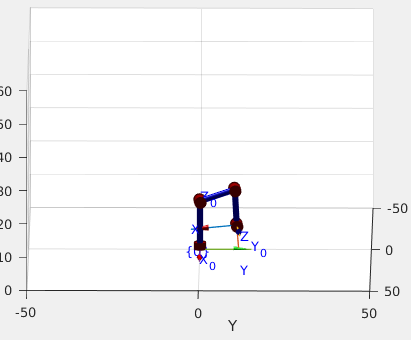
Mostramos la solución y la graficamos con ayuda del teach.
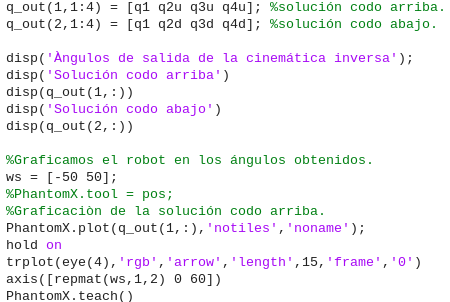
Obteniendo la siguiente representación.
Existen multiples comandos del toolbox de Peter Corke que funcionan para determinar la cinematica inversa de un manipulador, los cuales listamos a continuacion:
- SerialLink.ikine6s : Calcula la cinematica inversa de forma analitica para robots de 6 grados de libertad con muñeca esferica. Permite hallar una solucion especifica segun los parametros de configuracion dados.
- SerialLink.ikine3 : Calcula la cinematica inversa para robots con 3 grados de libertad sin muñeca. Es igual a ikine6s pero sin la muñeca esferica.
- SerialLink.ikine : Calcula la cinematica inversa por metodos numericos. Es una solucion general y suele preferirse usar otras soluciones especificas para un caso dado. No funciona bien para robots con 4 o 5 grados de libertad.
- SerialLink.ikunc : Calcula la cinematica inversa por metodos numericos, sin tener en cuenta los limites de las articulaciones. Requiere el Toolbox de Optimizacion, pues utiliza la funcion fminunc.
- SerialLink.ikcon : Calcula la cinematica inversa por metodos numericos, teniendo en cuenta los limites de las articulaciones. Requiere el Toolbox de Optimizacion, pues utiliza la funcion fmincon.
- SerialLink.ikine_sym : Calcula la cinematica inversa de forma simbolica, con multiples celdas dependiendo del numero de configuraciones diferentes que se puedan tener para la solucion. Requiere el Symbolic Toolbox de Matlab y es codigo experimental.
Sabiendo que el robot Phantom X posee 4 GDL, de los cuales 3 corresponden a posición, el GDL restante proporciona una medida independiente para un ángulo de orientación (asuma orientación en ángulos fijos).
-
¿De qué ángulo de orientación se trata?
Se trata del angulo de orientacion respecto al eje x, el cual es perpendicular al plano z-y en el que se encuentra ubicado el mecanismo planar 3R de este robot.
-
¿Cuántas soluciones posibles existen para la cinemática inversa del manipulador Phantom X?
Existen dos posibles soluciones, estas se denominan como "Codo arriba" o "Codo Abajo", las cuales varian en los valores para las articulaciones 2, 3 y 4, y en general se pueden diferenciar por la posicion en z de la tercera articulacion, la cual sera mas arriba en el primer caso y mas abajo en el segundo.
-
Consulte en qué consiste el espacio diestro de un manipulador.
El espacio diestro de un manipulador es el espacio de trabajo compuesto por todos los puntos que puede alcanzar el efector final en cualquier orientacion que le sea permitida al manipulador (que dependera del numero de grados de libertad del mismo).
• Las trayectorias deberán ser tipo pick and place, esto es, recorridos en forma rectangular, movimientos verticales para subir y bajar, y movimiento horizontal para realizar desplazamientos.
Declaramos la cinemática directa del robots así como la conexión con el nodo maestro, la creación del cliente y el respectivo mensaje.
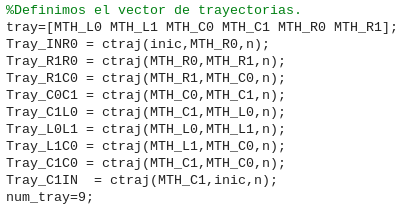
Establecemos las matrices de transformación homogéneas que definen las poses de los puntos de interés para la generación de la rutina pick and place, posteriormente, establecemos las diferentes trayectorias que unen los puntos de interés.
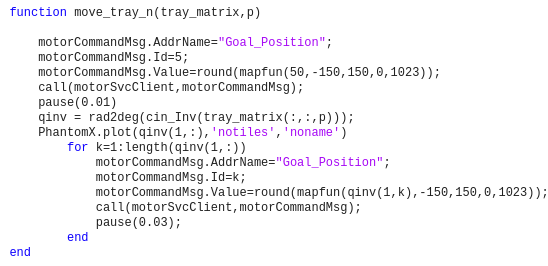
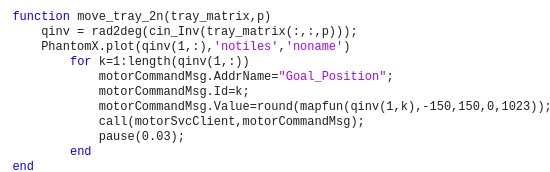
Posteriormente definimos las rutinas para la implementación del movimiento de cada trayectoria, para lo cual, se cuenta con las funciones move_tray_n y move_tray_2n.
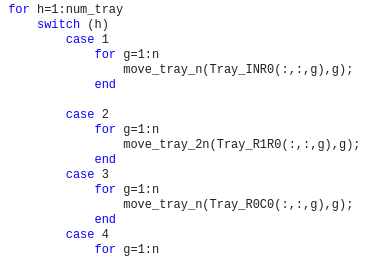
Finalmente las funciones move_tray_n y move_tray_2n, nos permiteninvocar los servicios y enviar los mensajes, para ejecutar las trayectorias definidas arribas en tiempo real.
-
El refinamiento de los algoritmos elaborados para la manipulación del robot requiere de la retroalimentación que brinda la observación del desempeño real, con esto es posible verificar si parámetros como la cantidad de puntos elegida para la definición de las trayectorias, las restricciones de los motores y la velocidad de ejecución de los movimientos, son apropiados para la implementación exitosa de las rutinas elaboradas.
-
Definir apropiadamente los parámetros del robot, así como la concepción idónea de las cinemáticas, influye de forma importante sobre el desempeño del robot y sobre todo en que los movimientos comandados se implementen de manera apropiada según lo planeado, pues de no tener un modelo correcto, las discrepancias entre lo comandado y lo ejecutado son más que notorias.