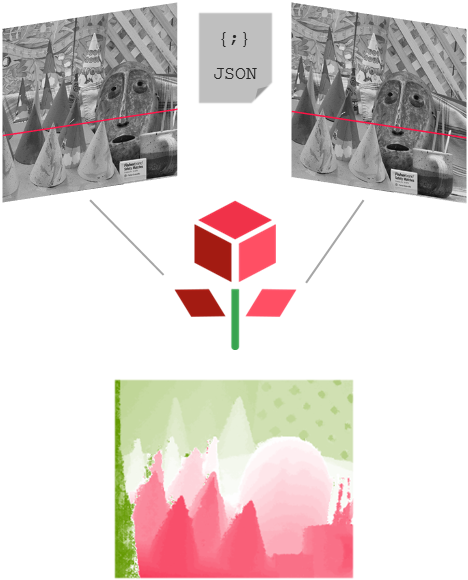
| From stereo rectified images to disparity map | Pandora is working with cost volumes |
|---|---|
 |
|
Pandora is a stereo matching flexible framework made for research and production with state of the art performances:
- Inspired from the (Scharstein et al., 2002) modular taxonomy, it allows one to emulate, analyse and hopefully improve state of the art stereo algorithms with a few lines of code.
- For production purpose, Pandora have been created for the CNES & Airbus CO3D project processing chain, as CARS core stereo matching tool.
The tool is open for contributions, contact us to pandora AT cnes.fr !
Pandora is available on Pypi and can be installed by:
pip install pandoraFor stereo reconstruction, install pandora with following plugins:
# SGM regularization
pip install pandora[sgm]
# MCCNN AI matching cost capability (heavy!)
pip install pandora[mccnn]# Download configuration file
wget https://raw.githubusercontent.com/CNES/Pandora/master/data_samples/json_conf_files/a_local_block_matching.json
# Download data samples
wget https://raw.githubusercontent.com/CNES/Pandora/master/data_samples/images/cones.zip
# Uncompress data
unzip cones.zip
# Run pandora
pandora a_local_block_matching.json output_dir
# Left and right disparity maps are saved in output_dir: left_disparity.tif and right_disparity.tifTo go further, please consult our online documentation.
- Scharstein, D., & Szeliski, R. (2002). A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. International journal of computer vision, 47(1-3), 7-42.
- Scharstein, D., & Szeliski, R. (2003, June). High-accuracy stereo depth maps using structured light. In IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2003. Proceedings. (Vol. 1, pp. I-I).
- 2003 Middleburry dataset (D. Scharstein & R. Szeliski, 2003).
Plugin_LibSGM - Stereo Matching Algorithm plugin for Pandora
Plugin_MC-CNN - MC-CNN Neural Network plugin for Pandora
Pandora2D - CNES Image Registration framework based on Pandora, with 2D disparity maps.
CARS - CNES 3D reconstruction software
Please cite the following papers when using Pandora:
- Cournet, M., Sarrazin, E., Dumas, L., Michel, J., Guinet, J., Youssefi, D., Defonte, V., Fardet, Q., 2020. Ground-truth generation and disparity estimation for optical satellite imagery. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences.
- Youssefi D., Michel, J., Sarrazin, E., Buffe, F., Cournet, M., Delvit, J., L’Helguen, C., Melet, O., Emilien, A., Bosman, J., 2020. Cars: A photogrammetry pipeline using dask graphs to construct a global 3d model. IGARSS - IEEE International Geoscience and Remote Sensing Symposium.