
参与本项目,贡献其他语言版本的代码,拥抱开源,让更多学习算法的小伙伴们收益!
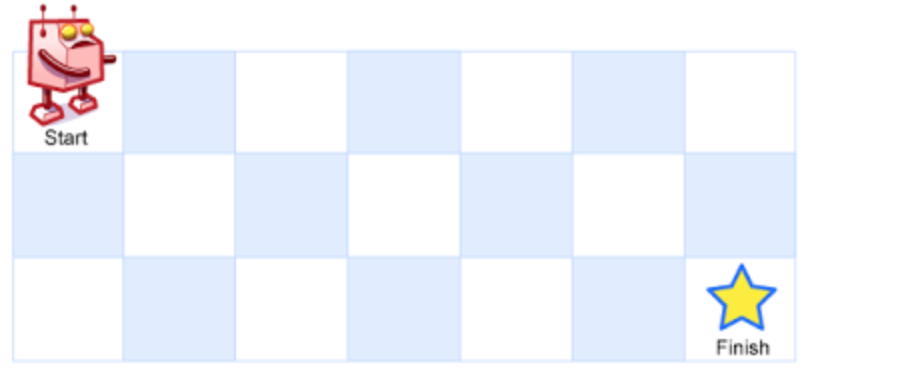
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
示例 1:
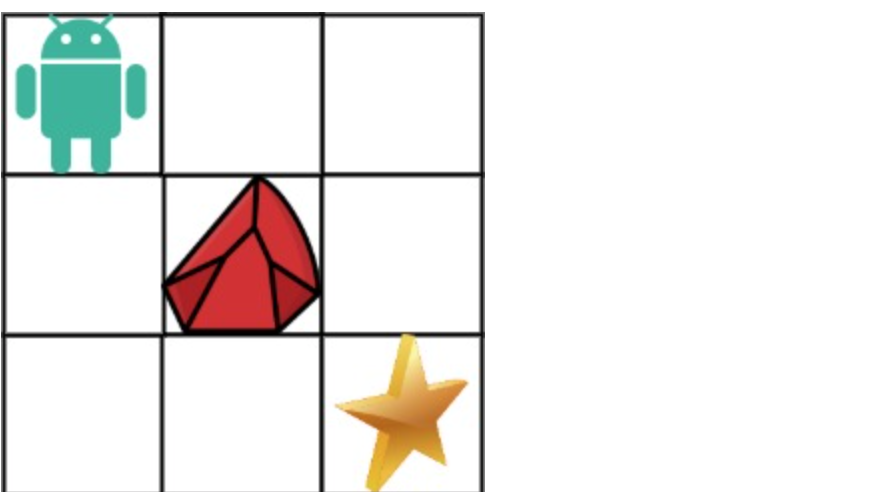
- 输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
- 输出:2 解释:
- 3x3 网格的正中间有一个障碍物。
- 从左上角到右下角一共有 2 条不同的路径:
- 向右 -> 向右 -> 向下 -> 向下
- 向下 -> 向下 -> 向右 -> 向右
示例 2:

- 输入:obstacleGrid = [[0,1],[0,0]]
- 输出:1
提示:
- m == obstacleGrid.length
- n == obstacleGrid[i].length
- 1 <= m, n <= 100
- obstacleGrid[i][j] 为 0 或 1
《代码随想录》算法视频公开课:动态规划,这次遇到障碍了| LeetCode:63. 不同路径 II,相信结合视频再看本篇题解,更有助于大家对本题的理解。
这道题相对于62.不同路径 就是有了障碍。
第一次接触这种题目的同学可能会有点懵,这有障碍了,应该怎么算呢?
62.不同路径中我们已经详细分析了没有障碍的情况,有障碍的话,其实就是标记对应的dp table(dp数组)保持初始值(0)就可以了。
动规五部曲:
- 确定dp数组(dp table)以及下标的含义
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
- 确定递推公式
递推公式和62.不同路径一样,dp[i][j] = dp[i - 1][j] + dp[i][j - 1]。
但这里需要注意一点,因为有了障碍,(i, j)如果就是障碍的话应该就保持初始状态(初始状态为0)。
所以代码为:
if (obstacleGrid[i][j] == 0) { // 当(i, j)没有障碍的时候,再推导dp[i][j]
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}- dp数组如何初始化
在62.不同路径不同路径中我们给出如下的初始化:
vector<vector<int>> dp(m, vector<int>(n, 0)); // 初始值为0
for (int i = 0; i < m; i++) dp[i][0] = 1;
for (int j = 0; j < n; j++) dp[0][j] = 1;因为从(0, 0)的位置到(i, 0)的路径只有一条,所以dp[i][0]一定为1,dp[0][j]也同理。
但如果(i, 0) 这条边有了障碍之后,障碍之后(包括障碍)都是走不到的位置了,所以障碍之后的dp[i][0]应该还是初始值0。
如图:
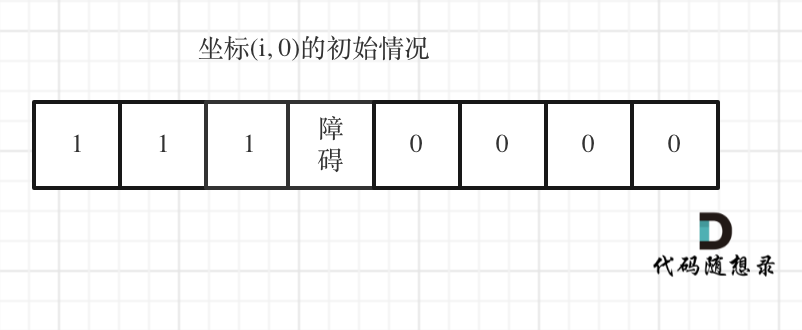
下标(0, j)的初始化情况同理。
所以本题初始化代码为:
vector<vector<int>> dp(m, vector<int>(n, 0));
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) dp[i][0] = 1;
for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) dp[0][j] = 1;注意代码里for循环的终止条件,一旦遇到obstacleGrid[i][0] == 1的情况就停止dp[i][0]的赋值1的操作,dp[0][j]同理
- 确定遍历顺序
从递归公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1] 中可以看出,一定是从左到右一层一层遍历,这样保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值。
代码如下:
for (int i = 1; i < m; i++) {
for (int j = 1; j < n; j++) {
if (obstacleGrid[i][j] == 1) continue;
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}- 举例推导dp数组
拿示例1来举例如题:
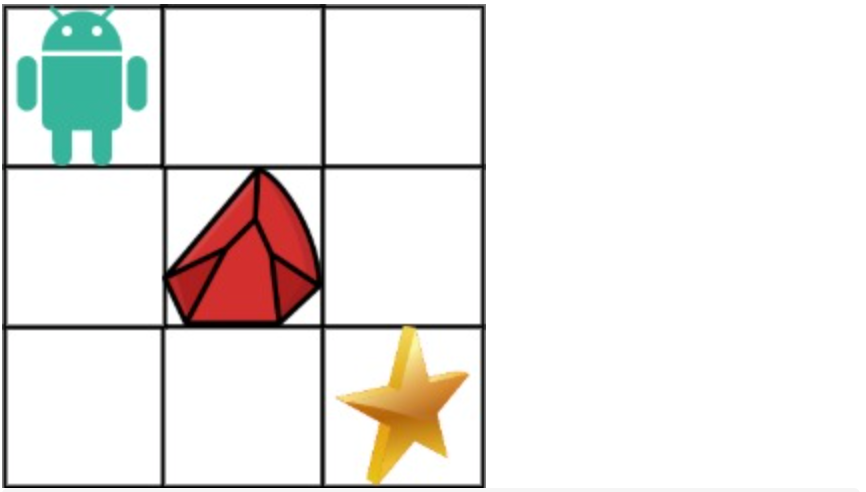
对应的dp table 如图:
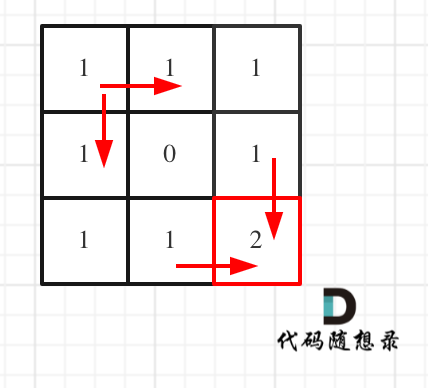
如果这个图看不懂,建议再理解一下递归公式,然后照着文章中说的遍历顺序,自己推导一下!
动规五部分分析完毕,对应C++代码如下:
class Solution {
public:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
int m = obstacleGrid.size();
int n = obstacleGrid[0].size();
if (obstacleGrid[m - 1][n - 1] == 1 || obstacleGrid[0][0] == 1) //如果在起点或终点出现了障碍,直接返回0
return 0;
vector<vector<int>> dp(m, vector<int>(n, 0));
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) dp[i][0] = 1;
for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) dp[0][j] = 1;
for (int i = 1; i < m; i++) {
for (int j = 1; j < n; j++) {
if (obstacleGrid[i][j] == 1) continue;
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
return dp[m - 1][n - 1];
}
};- 时间复杂度:O(n × m),n、m 分别为obstacleGrid 长度和宽度
- 空间复杂度:O(n × m)
同样我们给出空间优化版本:
class Solution {
public:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
if (obstacleGrid[0][0] == 1)
return 0;
vector<int> dp(obstacleGrid[0].size());
for (int j = 0; j < dp.size(); ++j)
if (obstacleGrid[0][j] == 1)
dp[j] = 0;
else if (j == 0)
dp[j] = 1;
else
dp[j] = dp[j-1];
for (int i = 1; i < obstacleGrid.size(); ++i)
for (int j = 0; j < dp.size(); ++j){
if (obstacleGrid[i][j] == 1)
dp[j] = 0;
else if (j != 0)
dp[j] = dp[j] + dp[j-1];
}
return dp.back();
}
};- 时间复杂度:O(n × m),n、m 分别为obstacleGrid 长度和宽度
- 空间复杂度:O(m)
本题是62.不同路径的障碍版,整体思路大体一致。
但就算是做过62.不同路径,在做本题也会有感觉遇到障碍无从下手。
其实只要考虑到,遇到障碍dp[i][j]保持0就可以了。
也有一些小细节,例如:初始化的部分,很容易忽略了障碍之后应该都是0的情况。
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int m = obstacleGrid.length;
int n = obstacleGrid[0].length;
int[][] dp = new int[m][n];
//如果在起点或终点出现了障碍,直接返回0
if (obstacleGrid[m - 1][n - 1] == 1 || obstacleGrid[0][0] == 1) {
return 0;
}
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) {
dp[i][0] = 1;
}
for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) {
dp[0][j] = 1;
}
for (int i = 1; i < m; i++) {
for (int j = 1; j < n; j++) {
dp[i][j] = (obstacleGrid[i][j] == 0) ? dp[i - 1][j] + dp[i][j - 1] : 0;
}
}
return dp[m - 1][n - 1];
}
}// 空间优化版本
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int m = obstacleGrid.length;
int n = obstacleGrid[0].length;
int[] dp = new int[n];
for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) {
dp[j] = 1;
}
for (int i = 1; i < m; i++) {
for (int j = 0; j < n; j++) {
if (obstacleGrid[i][j] == 1) {
dp[j] = 0;
} else if (j != 0) {
dp[j] += dp[j - 1];
}
}
}
return dp[n - 1];
}
}动态规划(版本一)
class Solution:
def uniquePathsWithObstacles(self, obstacleGrid):
m = len(obstacleGrid)
n = len(obstacleGrid[0])
if obstacleGrid[m - 1][n - 1] == 1 or obstacleGrid[0][0] == 1:
return 0
dp = [[0] * n for _ in range(m)]
for i in range(m):
if obstacleGrid[i][0] == 0: # 遇到障碍物时,直接退出循环,后面默认都是0
dp[i][0] = 1
else:
break
for j in range(n):
if obstacleGrid[0][j] == 0:
dp[0][j] = 1
else:
break
for i in range(1, m):
for j in range(1, n):
if obstacleGrid[i][j] == 1:
continue
dp[i][j] = dp[i - 1][j] + dp[i][j - 1]
return dp[m - 1][n - 1]动态规划(版本二)
class Solution:
def uniquePathsWithObstacles(self, obstacleGrid):
m = len(obstacleGrid) # 网格的行数
n = len(obstacleGrid[0]) # 网格的列数
if obstacleGrid[m - 1][n - 1] == 1 or obstacleGrid[0][0] == 1:
# 如果起点或终点有障碍物,直接返回0
return 0
dp = [[0] * n for _ in range(m)] # 创建一个二维列表用于存储路径数
# 设置起点的路径数为1
dp[0][0] = 1 if obstacleGrid[0][0] == 0 else 0
# 计算第一列的路径数
for i in range(1, m):
if obstacleGrid[i][0] == 0:
dp[i][0] = dp[i - 1][0]
# 计算第一行的路径数
for j in range(1, n):
if obstacleGrid[0][j] == 0:
dp[0][j] = dp[0][j - 1]
# 计算其他位置的路径数
for i in range(1, m):
for j in range(1, n):
if obstacleGrid[i][j] == 1:
continue
dp[i][j] = dp[i - 1][j] + dp[i][j - 1]
return dp[m - 1][n - 1] # 返回终点的路径数
动态规划(版本三)
class Solution:
def uniquePathsWithObstacles(self, obstacleGrid):
if obstacleGrid[0][0] == 1:
return 0
dp = [0] * len(obstacleGrid[0]) # 创建一个一维列表用于存储路径数
# 初始化第一行的路径数
for j in range(len(dp)):
if obstacleGrid[0][j] == 1:
dp[j] = 0
elif j == 0:
dp[j] = 1
else:
dp[j] = dp[j - 1]
# 计算其他行的路径数
for i in range(1, len(obstacleGrid)):
for j in range(len(dp)):
if obstacleGrid[i][j] == 1:
dp[j] = 0
elif j != 0:
dp[j] = dp[j] + dp[j - 1]
return dp[-1] # 返回最后一个元素,即终点的路径数动态规划(版本四)
class Solution:
def uniquePathsWithObstacles(self, obstacleGrid):
if obstacleGrid[0][0] == 1:
return 0
m, n = len(obstacleGrid), len(obstacleGrid[0])
dp = [0] * n # 创建一个一维列表用于存储路径数
# 初始化第一行的路径数
for j in range(n):
if obstacleGrid[0][j] == 1:
break
dp[j] = 1
# 计算其他行的路径数
for i in range(1, m):
if obstacleGrid[i][0] == 1:
dp[0] = 0
for j in range(1, n):
if obstacleGrid[i][j] == 1:
dp[j] = 0
else:
dp[j] += dp[j - 1]
return dp[-1] # 返回最后一个元素,即终点的路径数动态规划(版本五)
class Solution:
def uniquePathsWithObstacles(self, obstacleGrid):
if obstacleGrid[0][0] == 1:
return 0
m, n = len(obstacleGrid), len(obstacleGrid[0])
dp = [0] * n # 创建一个一维列表用于存储路径数
# 初始化第一行的路径数
for j in range(n):
if obstacleGrid[0][j] == 1:
break
dp[j] = 1
# 计算其他行的路径数
for i in range(1, m):
if obstacleGrid[i][0] == 1:
dp[0] = 0
for j in range(1, n):
if obstacleGrid[i][j] == 1:
dp[j] = 0
continue
dp[j] += dp[j - 1]
return dp[-1] # 返回最后一个元素,即终点的路径数
func uniquePathsWithObstacles(obstacleGrid [][]int) int {
m, n := len(obstacleGrid), len(obstacleGrid[0])
//如果在起点或终点出现了障碍,直接返回0
if obstacleGrid[m-1][n-1] == 1 || obstacleGrid[0][0] == 1 {
return 0
}
// 定义一个dp数组
dp := make([][]int, m)
for i, _ := range dp {
dp[i] = make([]int, n)
}
// 初始化, 如果是障碍物, 后面的就都是0, 不用循环了
for i := 0; i < m && obstacleGrid[i][0] == 0; i++ {
dp[i][0] = 1
}
for i := 0; i < n && obstacleGrid[0][i] == 0; i++ {
dp[0][i] = 1
}
// dp数组推导过程
for i := 1; i < m; i++ {
for j := 1; j < n; j++ {
// 如果obstacleGrid[i][j]这个点是障碍物, 那么dp[i][j]保持为0
if obstacleGrid[i][j] != 1 {
// 否则我们需要计算当前点可以到达的路径数
dp[i][j] = dp[i-1][j] + dp[i][j-1]
}
}
}
return dp[m-1][n-1]
}var uniquePathsWithObstacles = function(obstacleGrid) {
const m = obstacleGrid.length
const n = obstacleGrid[0].length
const dp = Array(m).fill().map(item => Array(n).fill(0))
for (let i = 0; i < m && obstacleGrid[i][0] === 0; ++i) {
dp[i][0] = 1
}
for (let i = 0; i < n && obstacleGrid[0][i] === 0; ++i) {
dp[0][i] = 1
}
for (let i = 1; i < m; ++i) {
for (let j = 1; j < n; ++j) {
dp[i][j] = obstacleGrid[i][j] === 1 ? 0 : dp[i - 1][j] + dp[i][j - 1]
}
}
return dp[m - 1][n - 1]
};
// 版本二:内存优化,直接以原数组为dp数组
var uniquePathsWithObstacles = function(obstacleGrid) {
const m = obstacleGrid.length;
const n = obstacleGrid[0].length;
for (let i = 0; i < m; i++) {
for (let j = 0; j < n; j++) {
if (obstacleGrid[i][j] === 0) {
// 不是障碍物
if (i === 0) {
// 取左边的值
obstacleGrid[i][j] = obstacleGrid[i][j - 1] ?? 1;
} else if (j === 0) {
// 取上边的值
obstacleGrid[i][j] = obstacleGrid[i - 1]?.[j] ?? 1;
} else {
// 取左边和上边的和
obstacleGrid[i][j] = obstacleGrid[i - 1][j] + obstacleGrid[i][j - 1];
}
} else {
// 如果是障碍物,则路径为0
obstacleGrid[i][j] = 0;
}
}
}
return obstacleGrid[m - 1][n - 1];
};function uniquePathsWithObstacles(obstacleGrid: number[][]): number {
/**
dp[i][j]: 到达(i, j)的路径数
dp[0][*]: 用u表示第一个障碍物下标,则u之前为1,u之后(含u)为0
dp[*][0]: 同上
...
dp[i][j]: obstacleGrid[i][j] === 1 ? 0 : dp[i-1][j] + dp[i][j-1];
*/
const m: number = obstacleGrid.length;
const n: number = obstacleGrid[0].length;
const dp: number[][] = new Array(m).fill(0).map(_ => new Array(n).fill(0));
for (let i = 0; i < m && obstacleGrid[i][0] === 0; i++) {
dp[i][0] = 1;
}
for (let i = 0; i < n && obstacleGrid[0][i] === 0; i++) {
dp[0][i] = 1;
}
for (let i = 1; i < m; i++) {
for (let j = 1; j < n; j++) {
if (obstacleGrid[i][j] === 1) continue;
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
return dp[m - 1][n - 1];
};impl Solution {
pub fn unique_paths_with_obstacles(obstacle_grid: Vec<Vec<i32>>) -> i32 {
let m: usize = obstacle_grid.len();
let n: usize = obstacle_grid[0].len();
if obstacle_grid[0][0] == 1 || obstacle_grid[m-1][n-1] == 1 {
return 0;
}
let mut dp = vec![vec![0; n]; m];
for i in 0..m {
if obstacle_grid[i][0] == 1 {
break;
}
else { dp[i][0] = 1; }
}
for j in 0..n {
if obstacle_grid[0][j] == 1 {
break;
}
else { dp[0][j] = 1; }
}
for i in 1..m {
for j in 1..n {
if obstacle_grid[i][j] == 1 {
continue;
}
dp[i][j] = dp[i-1][j] + dp[i][j-1];
}
}
dp[m-1][n-1]
}
}空间优化:
impl Solution {
pub fn unique_paths_with_obstacles(obstacle_grid: Vec<Vec<i32>>) -> i32 {
let mut dp = vec![0; obstacle_grid[0].len()];
for (i, &v) in obstacle_grid[0].iter().enumerate() {
if v == 0 {
dp[i] = 1;
} else {
break;
}
}
for rows in obstacle_grid.iter().skip(1) {
for j in 0..rows.len() {
if rows[j] == 1 {
dp[j] = 0;
} else if j != 0 {
dp[j] += dp[j - 1];
}
}
}
dp.pop().unwrap()
}
}//初始化dp数组
int **initDP(int m, int n, int** obstacleGrid) {
int **dp = (int**)malloc(sizeof(int*) * m);
int i, j;
//初始化每一行数组
for(i = 0; i < m; ++i) {
dp[i] = (int*)malloc(sizeof(int) * n);
}
//先将第一行第一列设为0
for(i = 0; i < m; ++i) {
dp[i][0] = 0;
}
for(j = 0; j < n; ++j) {
dp[0][j] = 0;
}
//若碰到障碍,之后的都走不了。退出循环
for(i = 0; i < m; ++i) {
if(obstacleGrid[i][0]) {
break;
}
dp[i][0] = 1;
}
for(j = 0; j < n; ++j) {
if(obstacleGrid[0][j])
break;
dp[0][j] = 1;
}
return dp;
}
int uniquePathsWithObstacles(int** obstacleGrid, int obstacleGridSize, int* obstacleGridColSize){
int m = obstacleGridSize, n = *obstacleGridColSize;
//初始化dp数组
int **dp = initDP(m, n, obstacleGrid);
int i, j;
for(i = 1; i < m; ++i) {
for(j = 1; j < n; ++j) {
//若当前i,j位置有障碍
if(obstacleGrid[i][j])
//路线不同
dp[i][j] = 0;
else
dp[i][j] = dp[i-1][j] + dp[i][j-1];
}
}
//返回最后终点的路径个数
return dp[m-1][n-1];
}空间优化版本:
int uniquePathsWithObstacles(int** obstacleGrid, int obstacleGridSize, int* obstacleGridColSize){
int m = obstacleGridSize;
int n = obstacleGridColSize[0];
int *dp = (int*)malloc(sizeof(int) * n);
int i, j;
// 初始化dp为第一行起始状态。
for (j = 0; j < n; ++j) {
if (obstacleGrid[0][j] == 1)
dp[j] = 0;
else if (j == 0)
dp[j] = 1;
else
dp[j] = dp[j - 1];
}
for (i = 1; i < m; ++i) {
for (j = 0; j < n; ++j) {
if (obstacleGrid[i][j] == 1)
dp[j] = 0;
// 若j为0,dp[j]表示最左边一列,无需改动
// 此处dp[j],dp[j-1]等同于二维dp中的dp[i-1][j]和dp[i][j-1]
else if (j != 0)
dp[j] += dp[j - 1];
}
}
return dp[n - 1];
}object Solution {
import scala.util.control.Breaks._
def uniquePathsWithObstacles(obstacleGrid: Array[Array[Int]]): Int = {
var (m, n) = (obstacleGrid.length, obstacleGrid(0).length)
var dp = Array.ofDim[Int](m, n)
// 比如break、continue这些流程控制需要使用breakable
breakable(
for (i <- 0 until m) {
if (obstacleGrid(i)(0) != 1) dp(i)(0) = 1
else break()
}
)
breakable(
for (j <- 0 until n) {
if (obstacleGrid(0)(j) != 1) dp(0)(j) = 1
else break()
}
)
for (i <- 1 until m; j <- 1 until n; if obstacleGrid(i)(j) != 1) {
dp(i)(j) = dp(i - 1)(j) + dp(i)(j - 1)
}
dp(m - 1)(n - 1)
}
}
